Dynamic Data Physicalisation
We are developing a conceptual as well as software framework that can be used for the rapid prototyping and experimentation with dynamic data physicalisation solutions. For a more systematic approach in the design and development of data physicalisations, there is a need for a conceptual data physicalisation framework which can then also serve the development of a software framework for dynamic data physicalistion. The core of our dynamic data physicalisation framework is based on an investigation of the dynamic data physicalisation design space as well as a dynamic data physicalisation grammar. The software framework for dynamic data physicalisation that we are currently developing is going to be extensible via specific software drivers in order to ensure that it can deal with future data physicalisation technologies and smart materials. An overview of our conceptual framework for dynamic data physicalisation is given in Figure 1.
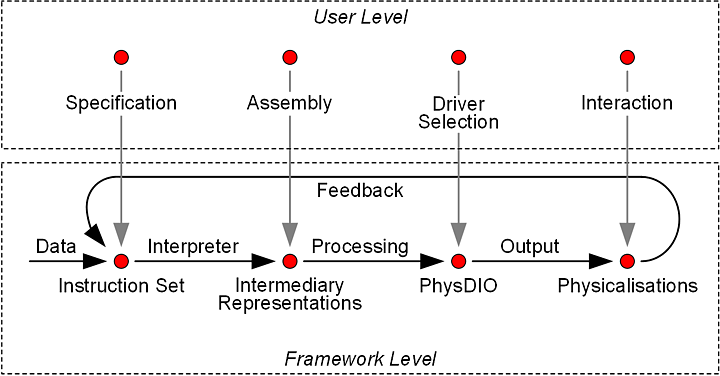
Data is going to be interpreted based on a number of specifications provided by the user (e.g. the set of data dimensions to be physicalised) in combination with the instruction set defined by the data physicalisation grammar. The resulting intermediary representation is then shown to the user together with possible physical variables in order that they can assemble the desired physical device-independent output (PhysDIO) consisting of a selection of these physical variables based on their preferences (e.g. a user might prefer haptic over thermal physicalisation). In a final phase, the user has the chance to select between different available drivers/devices which will then be used for transforming the PhysDIO into a concrete dynamic data physicalisation. Note that in contrast to existing static data physicalisations, at this stage any interaction by one or multiple users with the physical data representation might change the underlying specification and result in a dynamic update of the corresponding data physicalisation.
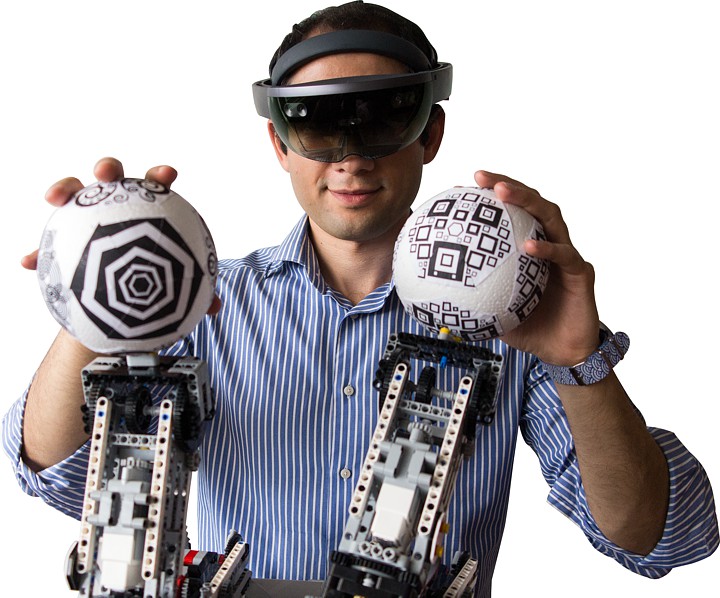
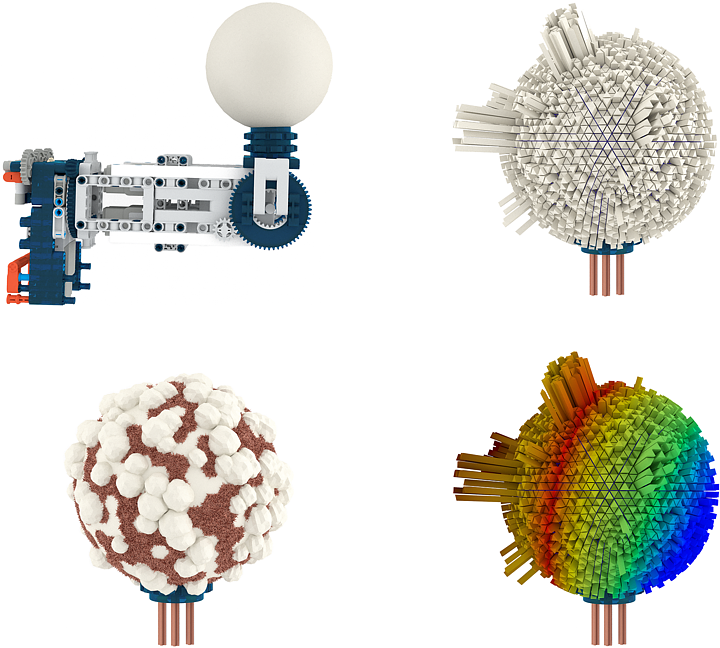
We are currently developing a software framework for dynamic data physicalisation by envisioning future technological advancements similar to the vision-driven design research approach proposed by Ishii et al. for programmable matter. While we focus on the fundamental operators and interactions for dynamic data physicalisation, not all of the features offered by the core of our framework might already be supported by existing data physicalisation technologies. However, our framework for dynamic data physicalisation can be extended via specific software drivers transforming the physical device-independent output into some concrete data physicalisations. For example, such a driver might transform the PhysDIO produced during the processing phase into commands for the tangible hologram (TangHo) platform which is also developed in our research lab and enables the experimentation with different physical variables for new forms of dynamic data physicalisation. Figure 2 shows a user interacting with an early prototype of the TangHo platform. The idea is that the TangHo platform supports different end effectors for different types of physical variables and data physicalisations. Figure 3 shows a concept study of some of these end effectors, including a shape-changing end effector (top right), shape-thermal end effector (bottom right) as well as a shape-tactile end effector (bottom left).
Our data physicalisation framework is going to make use of existing approaches for importing data (e.g. reading data from a file, connecting to a relational database management system (RDBMS) or connecting to a cluster). We see our dynamic data physicalisation approach as an alternative to pure data visualisation and will therefore not focus on other issues of data analysis (e.g. data warehousing, machine learning or clustering) but rather assume that users understand that some pre-processing might be necessary depending on the type of data.